Arneson Surface Drives
ARNESON SURFACE DRIVES THE FIRST AND THE FASTEST ARTICULATED SURFACE DRIVE SYSTEM
When we speak about marine propulsion systems we usually refer to conventional under water propellers being the most common and worldwide known systems used for marine application.
A conventional system like this if well designed can allow good performance for top speeds of about 35 knots and in few cases up to 40 knots.
The technology to move into the realm of over forty, fifty, sixty and above are now available and have been proven.
The conventional propulsion system of fully submerged propeller and inclined shaft has been left behind for the development of surface drive systems particularly Arneson Drives the first articulated surface system released into the market.
ARNESON HISTORY
Arneson Surface Drives (ASD) was originally developed as a “go fast toy” for its inventor Mr. Howard Arneson visit: www.howardarneson.com.
The drive has been through an evolution of technical problems and has emerged as an extremely reliable system used by boat and yacht builders.
The creation of his unique surface drive system began as an hobby.
 Arneson spent about three years developing the drive system, which was introduced in 1980. He began with a fixed shaft arrangement with a surface piercing propeller, and although the basic idea worked, it was impossible to trim up or down.
Arneson spent about three years developing the drive system, which was introduced in 1980. He began with a fixed shaft arrangement with a surface piercing propeller, and although the basic idea worked, it was impossible to trim up or down.
Howard Arneson taught “I could not find the sweetheart spot that’s right for all conditions” and also it needed rudders to steer with.
After changing the spot and angle several times, he figured that if he could develop a trimming system, he’d be on the way. A key element in his invention was a ball and a socket arrangement, which when coupled with a constant velocity joint would allow the operator to change the angle and achieve the trimmability Arneson was seeking.
The final configuration for the ASD was conceived in 1979 and the first models were constructed and tested in early 1980. Shortly after that, production began on the smallest model which we now call ASD 6.
Initially tested on many different racing applications, Arneson Surface Drives were immediately successful in a number of racing circuits around the world. From their initial debut, two of the world famous Miami-Nassau-Miami off shore races were won on stock, fully warranted, factory Arneson Drive units, as well as numerous off shore class 1 world championship events. ( Steve Curtiss, Cougar Cat, 1988, Howard Arneson, 1983 and 1984 )
Since the production of Arneson Surface drives in 1980, many catamarans in excess of 150 mph have been designed and are currently in operation today.
 SKATER 46’ 1x4500Hp Textron Lycoming gas turbine/ASD 10 B 1 L over 150 knots
SKATER 46’ 1x4500Hp Textron Lycoming gas turbine/ASD 10 B 1 L over 150 knots
Since then thousands of ASD have been produced and ASD is became the most popular and used surface drive system in the world.
In 1992 Twin Disc Inc. one of the major Company in marine propulsion field acquired the rights to manufacture and distribute ASD. The development of different ASD sized has continued since that time to meet a wide range of applications in the boating industry, and today, Twin Disc offers nine different model sizes for gas, diesel and turbine engines up to 10,000 Hp.
Today, Twin Disc Arneson Surface Drives are in use throughout the world as an option for many pleasure boat builders. Designers are recognizing the many benefits that are offered by the use of ASD and are designing these units into new applications.
Over 20 Government Agencies around the world have recognized the many advantages of ASD and have built patrol boats and other craft that utilize ASD as well as Commercial operators who have applications ranging from small utility craft to ferry boats.
WHY ARNESON SURFACE DRIVES
Twin Disc Arneson Drives are among the most efficient marine propulsion system on the market.
They have been designed to solve some of the problem related to conventional shaft systems when installed on vessel with speed in excess of 35 knots.
Problems are due to installation and physical aspects. Here after some explanation about how ASD can overcome conventional shaft line limitation.
Geometric aspects: Installation
Traditional propeller design and selection is almost always an exercise in trading off diameter against several other performance limiting parameters, this while the basic momentum theory tells us that for a given speed and thrust, the larger the propeller, the higher the efficiency.
 Blade tip clearance from the hull, maximum vessel draft, shaft angle, and engine location all tend to limit the maximum feasible propeller diameter to something considerably smaller than the optimal size. The propeller diameter is simply the maximum that fits, sometimes it can also result in a considerable sacrifice of propulsive efficiency. Or, if these geometric limits on propeller diameter are exceeded, the result can be excessive vibration and damage due to low tip clearances, or a steep shaft angle with severe loss of efficiency and additional parasitic drag.
Blade tip clearance from the hull, maximum vessel draft, shaft angle, and engine location all tend to limit the maximum feasible propeller diameter to something considerably smaller than the optimal size. The propeller diameter is simply the maximum that fits, sometimes it can also result in a considerable sacrifice of propulsive efficiency. Or, if these geometric limits on propeller diameter are exceeded, the result can be excessive vibration and damage due to low tip clearances, or a steep shaft angle with severe loss of efficiency and additional parasitic drag.
The surface propeller, installed with an articulated surface propulsion system, frees the designer from these limitations. There is virtually no technical limit to the size of propeller that will work. The designer is able to use a much deeper reduction ratio, and a larger lightly loaded and more efficient propeller.
Physical aspects: Cavitation
 When a submerged propeller blade cavitates, the pressure on part of the blade becomes so low that a near vacuum is formed. When these cavities collapse, water impacts on the blade surface with a local pressure singularity. The effect can approximate that of hitting the blade with a hammer on each revolution. Cavitation is a major source of propeller damage, vibration, noise, and loss of performance. And although high speed propellers are often designed to operate in partially or fully cavitating mode, problems associated with cavitation are frequently a limiting factor in propeller design and selection.
When a submerged propeller blade cavitates, the pressure on part of the blade becomes so low that a near vacuum is formed. When these cavities collapse, water impacts on the blade surface with a local pressure singularity. The effect can approximate that of hitting the blade with a hammer on each revolution. Cavitation is a major source of propeller damage, vibration, noise, and loss of performance. And although high speed propellers are often designed to operate in partially or fully cavitating mode, problems associated with cavitation are frequently a limiting factor in propeller design and selection.
The surface propeller effectively eliminates cavitation by replacing it with ventilation. With each stroke, the propeller blade brings a bubble of air into what would otherwise be the vacuum cavity region. The water ram effect that occurs when a vacuum cavity collapses is almost completely suppressed by this entrained air. While the flow over a superventilating propeller blade bears a superficial resemblance to that over a supercavitating blade, the vibration, surface erosion, and underwater noise are absent.
Appendage drag
 Rudders, exposed shafts, struts, and propeller hubs all contribute to parasitic drag. Inclined exposed shafts not only produce form and frictional drag, but there is also induced drag associated with Magnus effect lift caused by their rotation.
Rudders, exposed shafts, struts, and propeller hubs all contribute to parasitic drag. Inclined exposed shafts not only produce form and frictional drag, but there is also induced drag associated with Magnus effect lift caused by their rotation.
 Frictional drag increases with the square of the speed. For speed in excess of 35 Knots the resistance induced by appendage drag becomes relevant and a considerable part of the hull resistance.
Frictional drag increases with the square of the speed. For speed in excess of 35 Knots the resistance induced by appendage drag becomes relevant and a considerable part of the hull resistance.
For speeds over 35 Knots this becomes a problem if associated with conventional systems, while surface propellers virtually eliminate drag from all these sources, as the only surfaces to contact the water are the propeller blades and a skeg.
TECHNICAL FEATURES & BENEFITS
ARTICULATION REASONS
Trimmability
The capability to trim up and/or down the drive is obtained through an hydraulic cylinder called “trim cylinder”. The ability to trim the Arneson Drives allows for the propeller submergence to match the engine horsepower output, thus more power is converted to producing thrust while the engine is operating closer or at its rated power curve.
 Propeller submergence can be adjusted while underway, by using a surface piercing propeller in conjunction with an ASD, allowing selection of the optimum thrust angle for varying load and sea condition.
Propeller submergence can be adjusted while underway, by using a surface piercing propeller in conjunction with an ASD, allowing selection of the optimum thrust angle for varying load and sea condition.
Steerability
Steering control and response is maximized when the propeller function is the essential directional force. Unlike conventional systems that vector propeller thrust off an external rudder, the Arneson Surface Drives angle the propellers in the appropriate direction of motion.
 Because the thrust steering the ASD can turn tighter, with greater control than fixed shaft drives. Tests shown that positive thrust steering has an effect double than propeller rudder effect. Maneuverability is improved at all speed. .Steering is power assisted via an engine driven pumps located on engines. For safety reasons a double power steering pump installation is always suggested.
Because the thrust steering the ASD can turn tighter, with greater control than fixed shaft drives. Tests shown that positive thrust steering has an effect double than propeller rudder effect. Maneuverability is improved at all speed. .Steering is power assisted via an engine driven pumps located on engines. For safety reasons a double power steering pump installation is always suggested.
Reversibility
The Surface Drives have the reputation for poor reversing characteristics. Unlike Surface fixed shaft system Arneson Surface Drives can be trimmed down during docking maneuvering improving a lot reversing.
However, reversing does not only depend by the Surface Drive System. Historically, Surface Drives equipped vessels have been high speed vessels (i.e., the original ASD equipped vessels were all race boats). The propellers designed for this high speed applications have an extremely inefficient blade shape for reversing. The leading edge is designed “cleaver style” on these propellers, very efficient to achieve the highest top speed but providing poor reverse capability.
New blade designs have been extensively studied by major propeller manufacturers to match pleasure as well as military vessel operating requirements.
New blade designs released over the last years have improved reverse maneuverability in respect to traditional “cleaver” type design and now harbor performance is very similar to conventional propeller applications thanks to this development together with an appropriate hull design and the use of Arneson articulated Surface Drive system.
The result of such innovative propulsion system can be summarized as follows:
- 15-30% speed increase over conventional systems
- 15-30% increase in fuel efficiency
- Shallow water maneuverability
- Reduced cavitation
- Larger selection of propellers
- Reduced underwater appendage drag up to 50%
- Positive thrust steering- superior maneuverability
- Maintenance simplicity- less than 20 moving parts
- Low maintenance requirements
- Greater flexibility of engine placement
- Less vibration- smoother running condition
ASD SELECTION
Arneson Surface Drives are application specific and selection can only be finalized upon completion of a propulsion analysis furnished by Twin Disc Application Engineers or its authorized representatives.
Twin Disc ASD “ Application Worksheet” and any other relevant data as well as construction plan drawings should be furnished to Twin Disc Application Engineers or its authorized representatives for this analysis.
As a general guideline the Arneson Surface Drives Application Analysis, software developed in cooperation with ROLLA SP worldwide leader in surface propellers (www.rolla-propellers.ch), may be used for preliminary selection of an ASD and for an estimation of the maximum speed achievable.
This preliminary information is not intended as a replacement for conducting a propulsion analysis.
Each application has to be approved by Twin Disc Marine Propulsion Groups.
ASD RANGE
The tested performance and reliability of the Arneson Surface Drives is available for all crafts ranging from 30 to 200 feet.
Two versions, In-line & drop box, eighteen models (ASD 6 through ASD 18) make ASD matching suitable for most of existing planing hulls and engine power.

ASD in line

ASD 8 drop box
Note: Some boats may require transom mounting wedges. Please consult Twin Disc Application Departments.

Application Worksheet
FAST BOATING WITH ARNESON SURFACE DRIVES
Fast boating With Arneson Surface Drives is much simpler than people usually think since the ASD behaves like a cross between an outdrive and a conventional shaft.
Just a few recommendations need to be given to “neophytes” on Arneson Surface Drives to exploit the best of the ASD system.
DOCK MANEUVERING
Surface propulsion has a reputation for very poor performance in reverse. A certain amount of this reputation is based on the fact that until very recently, nearly all surface propeller installations were on very high speed vessels using a “cleaver “ style propeller design. These propellers, due to the thick trailing edges, concave pressure face, and often heavy trailing edge cupping, are notoriously poor performers in reverse and this is true whether they are used as surface propellers or cavitating fully submerged propellers.
Over the last years new blade designs have been extensively studied by major propeller manufacturers to match pleasure as well as military vessel operating requirements.
New blade designs have improved reverse maneuverability in respect to the traditional “cleaver” type design and now harbor performance is very similar to conventional propeller applications, and thanks to this development together with an appropriate hull design and the use of the Arneson articulated Surface Drive system.
Unlike fixed shaft Surface systems that direct the whole slip stream against the vessel transom, Arneson Surface Drives, the first articulated system released into the market, can be trimmed down during docking maneuvering to improve reversing.
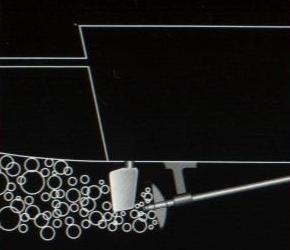
Dock maneuvering is made easier by trimming down drives in the red area (Picture 1) in a way that propellers can work in deeper water and water flow is not directed right against the transom. The drive angle depends on several factors, among them: hull deadrise,transom shape, propeller diameter, etc.
The optimum spot can be easily determinated by “playing” up and down the drive trim in the red area (Picture 1).
You will remain surprised that the ASD small rudders and the propellers produce the same positive grip on the water at low speed that helmsmen of shaft driven boats are used to having.
GETTING ON PLANE
Most planning hull designs, especially moderately low powered or heavy designs, are subject to problems getting through “hump” speed. High vessel resistance at pre planning speed, high propeller slip and reduced engine torque at less than full RPM can sometimes combine to make it impossible to reach the planning speed. With surface propulsion systems there is an additional factor which may make the situation worse. In fact the propeller is designed to operate with only half of the blade area immersed but at low speed, before the transom aerates or “dries outs”, the propeller must operate fully submerged. The result is that it takes much more torque to spin the propeller at a given engine RPM and sometimes the engine is not capable of providing the torque necessary to turn the propeller fast enough to get the boat up to the speed which allows the transom to aerate and unload the top half of the propeller.
To reduce this potential problem designers and boat builders in cooperation with Twin Disc Application Depts. and major propeller manufacturers, have to be particularly diligent in checking boat displacement, positioning the center of gravity and selecting the reduction ratio to be used at the gear box in order to obtain the best compromise between top speed and “get on plane” capability. Deeper ratios, therefore larger propeller diameters, may help in over coming this problem.
Arneson Surface Drives, having no geometric limitation in propeller diameter, free the designer from restrictions. There is virtually no technical limit to the size of propeller that will work. The designer is able to use a much deeper reduction ratio, and a larger lightly loaded and more efficient propeller.
Furthermore, one of the advantages of the Arneson “trimmability” is the improved capability to get on plane efficiently . Positioning the ASD down, in the red area shown in Picture 1, we obtain the effect called “bow down attitude” (blue arrow). The thrust forces generated by the propellers pass well above the dynamic center of pressure and the center of gravity causing the vessel bow to stay lower on the sea surface making it easier to get to planning speed. The drives remain in this position until the boat is over the hump (maximum hull resistance) then are trimmed up for optimum performance.
If the engine results overloaded (for the reasons specified before or due to occasional extra weight) it may be needed to trim Arneson Drives up in order to reduce propeller load (unloading the top half of the propeller). When engine starts increasing RPM, ASD can be trimmed down to obtain “bow down attitude” and get on plane quickly and easily.
Acceleration with Arneson Surface Drives is terrific!!! Try it to believe it
PLANNING CONDITIONS
Once the planning condition is achieved trim position depends on different factors.
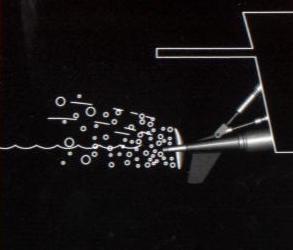
When the boat displacement matches the design displacement, trim position has to be about “zero” on the corresponding trim gauge (Picture 2). With this drive position engines have to reach the maximum rpm and the boats’ maximum performance.
We have noticed on a variety of applications that when the ASD is trimmed to its optimum high speed running position, and left in that position, the vessel never reaches its maximum potential speed.
However, if the operator trims the ASD up and allows the propeller to absorb the engine horsepower, adjusting the trim as the vessel speed increases, this will result in a speed increase of sometimes over seven to eight percent (7-8%).
This is mainly due the hull configuration which is particular for each single application.
In fact, hull configuration would require some trim angles up to reduce the wetted surface area corresponding to the top speed performance.
However, optimum performance is usually obtained with drives positioned in the yellow area Picture 2. Actual position is a boat feature, it depends on several factors and needs to be found by experience. However, normally it has to be within the yellow area.
CRUISING
It is also possible to reduce the boat speed and stay on plane by lowering the drives and increasing intermediate range speed. (ASD positions are still in the red area (Picture 1), lower at minimum planning speed, higher at higher planning speed).
When boat displacement is over the project displacement (beginning of a cruise with tanks full) ASD should be trimmed some degrees up to reduce the torque absorbed by the propeller. The ability to trim the ASD is somewhat analogous to adjusting the pitch on a controllable pitch propeller. Engine can work closer to its rated power curve.
Trim can be also used to suit different sea conditions. Arneson Surface Drives have always shown superior sea keeping ability thanks to the trimming capability.